Neue Bildgebungsmethode macht Kleinstroboter im Körper sichtbar
Wie lässt sich ein Blutgerinnsel ohne einen grossen chirurgischen Eingriff aus dem Hirn entfernen? Wie bringt man ein Medikament präzise zu einem schwer erreichbaren, erkrankten Organ? Das sind nur zwei Beispiele für die zahlreichen Innovationen, die Forschende im Gebiet der medizinischen Mikrorobotik anpeilen. Die winzigen Roboter versprechen, künftige medizinische Behandlungen grundlegend zu verändern: Eines Tages könnten sie sich durch die Blutgefässe von Patient:innen bewegen, um bösartige Tumore zu beseitigen, Infektionen zu bekämpfen oder präzise diagnostische Informationen zu liefern – und das alles auf nicht-invasive Weise. Im Prinzip, so die Forschenden, könnte der Blutkreislauf als ideales Transportnetz für die Mikroroboter dienen, da es alle Organe und Gewebe im Körper erreicht.
Damit solche Mikroroboter die vorgesehenen medizinischen Eingriffe sicher und zuverlässig durchführen können, dürfen sie nicht grösser als eine biologische Zelle sein. Beim Menschen hat eine Zelle im Schnitt einen Durchmesser von 25 Mikrometer – dabei beträgt ein Mikrometer ein Millionstel Meter. Die kleinsten Blutgefässe des Menschen, die Kapillaren, sind sogar noch dünner: Ihr Durchmesser beträgt im Schnitt nur 8 Mikrometer. Entsprechend klein müssen die Mikroroboter sein, wenn sie die kleinsten Blutgefässe ungehindert durchqueren sollen. Damit sind sie zugleich so klein, dass sie von blossem Auge nicht zu sehen sind – und auch die Wissenschaft hat noch keine technische Lösung gefunden, um die mikrometerkleinen Roboter im Körper einzeln zu erkennen und zu verfolgen.
Erstmals zirkulierende Mikroroboter abgebildet
«Bevor dieses Zukunftsszenario Realität wird, und die Mikroroboter tatsächlich am Menschen zum Einsatz kommen, ist es absolut erforderlich, dass wir diese winzigen Maschinen präzise sichtbar machen und nachverfolgen können», sagt Paul Wrede, Doktorand und Fellow am Max Planck ETH Center for Learning Systems (CLScall_made). «Ohne Bildgebung ist die Mikrorobotik im Grunde blind», ergänzt Daniel Razansky, Professor für Biomedizinische Bildgebungcall_made der ETH Zürich und der Universität Zürich sowie Mitglied des CLS. «Eine hochauflösende Bildgebung in Echtzeit ist daher unerlässlich, um zellgrosse Mikroroboter in einem lebenden Organismus zu erkennen und zu steuern.»
«Ohne Bildgebung ist die Mikrorobotik im Grunde blind.» Daniel Razansky
Weiter ist die Bildgebung auch eine Voraussetzung, um die erfolgten therapeutischen Eingriffe zu überwachen und zu überprüfen, ob die Roboter ihre Aufgabe wie vorgesehen erfüllt haben. «Die fehlende Möglichkeit, ein Echtzeit-Feedback zu den Mikrorobotern zu geben, war daher ein grosses Hindernis auf dem Weg zu einer klinischen Anwendung.»
Zusammen mit Metin Sitti, einem weltweit führenden Mikrorobotiker, der als Abteilungsleiter am Max-Planck-Institut für Intelligente Systeme (MPI-IS) und ETH-Professor für Physische Intelligenz ebenfalls CLS-Mitglied ist, sowie weiteren Forschenden hat das Team nun einen wichtigen Durchbruch in der effizienten Zusammenführung von Mikrorobotik und Bildgebung erzielt. In einer Studie, die soeben im Wissenschaftsjournal Science Advances erschienen ist, schafften sie es erstmals, bis zu fünf Mikrometer winzige Kleinstroboter mit einem nichtinvasiven, bildgebenden Verfahren in den Hirn-Blutgefässen von Mäusen klar und in Echtzeit nachzuweisen und zu verfolgen.
Die Forschenden setzten Mikroroboter mit einer Grösse von 5 bis 20 Mikrometern ein. Die kleinsten Roboter sind etwa so gross wie die roten Blutkörperchen, die einen Durchmesser von 7 bis 8 Mikrometern haben. Diese Grösse macht es möglich, dass sich die intravenös injizierten Mikroroboter selbst durch die dünnsten Mikrokapillaren im Hirn einer Maus fortbewegen können. Die Forschenden entwickelten auch eine spezielle optoakustische Tomographietechnik, um die klitzekleinen Roboter tatsächlich einzeln, hochaufgelöst und in Echtzeit zu erkennen.
Diese einzigartige Bildgebungsmethode ermöglicht es, die winzigen Roboter in tiefen und schwer zugänglichen Regionen des Körpers und des Gehirns aufzuspüren, was mit optischer Mikroskopie oder einer anderen Bildgebungstechnik nicht möglich gewesen wäre. Die Methode wird als optoakustisch bezeichnet, weil man zunächst Licht aussendet, das vom jeweiligen Gewebe absorbiert wird. Die Absorption erzeugt dann winzige Ultraschallwellen, die man erkennen und analysieren kann, um hochauflösende volumetrische Bilder zu erhalten.
Janusköpfige Roboter mit Goldschicht
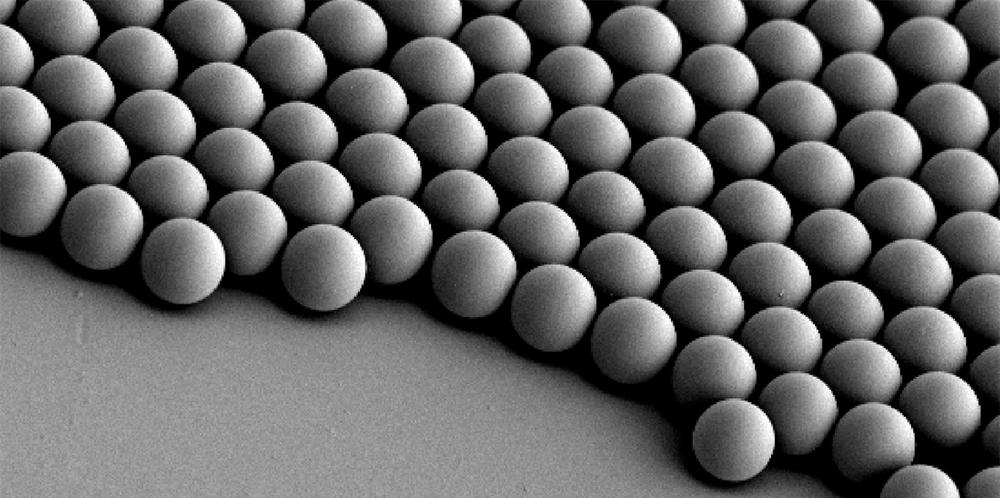
Um die Mikroroboter auf den Bildern deutlich sichtbar zu machen, benötigten die Forschenden ein geeignetes Kontrastmittel. Für ihre Studie verwendeten sie deshalb kugelförmige Mikroroboter auf der Basis von Siliziumdioxidpartikeln mit einer sogenannten Janus-Beschichtung. Dieser Roboter-Typ hat ein sehr robustes Design und eignet sich sehr gut für anspruchsvolle medizinische Aufgaben. Benannt ist er nach dem römischen Gott Janus, der zwei Gesichter besass. Bei den Robotern sind die beiden Kugelhälften jeweils unterschiedlich beschichtet. Im aktuellen Fall beschichteten die Forschenden die eine Roboterhälfte mit Nickel und die andere mit Gold.
«Gold ist ein sehr gutes Kontrastmittel für die optoakustische Bildgebung», erklärt Razansky, «ohne die Goldschicht ist das von den Mikrorobotern erzeugte Signal schlicht zu schwach, um erkannt zu werden.» Zusätzlich zum Gold testeten die Forschenden die Verwendung kleiner Bläschen, so genannte Nanoliposomen, die einen fluoreszierenden, grünen Farbstoff enthielten, der ebenfalls als Kontrastmittel diente. «Liposomen haben zudem den Vorteil, dass man sie mit Medikamenten beladen kann, was für künftige Ansätze zur gezielten Verabreichung von Medikamenten wichtig ist», sagt Wrede, der Erstautor der Studie. Die Einsatzmöglichkeiten der Liposomen werden in einer Folgestudie untersucht.
Mit dem Gold lässt sich zudem die zelltoxische Wirkung der Nickelbeschichtung minimieren – schliesslich müssen die künftigen Mikroroboter, wenn sie in lebenden Tieren oder Menschen eingesetzt werden sollen, bioverträglich und ungiftig sein, was Teil einer laufenden Forschungsarbeit ist. In der vorliegenden Studie verwendeten die Forschenden Nickel als magnetisches Antriebsmedium zusammen mit einem einfachen Permanentmagneten, um die Roboter zu ziehen. In Folgestudien wollen sie die optoakustische Bildgebung auch mit einer komplexeren Bewegungssteuerung testen, die rotierende Magnetfelder verwendet.
«Das gäbe uns die Möglichkeit, die Mikroroboter auch in stark fliessendem Blut präzise zu steuern und zu bewegen», sagt Metin Sitti. «In der vorliegenden Studie haben wir uns darauf konzentriert, die Mikroroboter sichtbar zu machen. Das Projekt war sehr erfolgreich dank der exzellenten Zusammenarbeit am CLS, die es ermöglichte, die Expertise der beiden Forschungsgruppen des MPI-IS in Stuttgart für den Roboterteil und der ETH Zürich für den bildgebenden Teil zu kombinieren», schliesst er.
Max Planck ETH Center for Learning Systems
Das Max Planck ETH Center for Learning Systems (CLScall_made) ist ein gemeinsames Lehr- und Forschungszentrum der ETH Zürich und der Max-Planck-Gesellschaft im Gebiet der intelligenten Systeme. Rund 50 Forschende beider Institutionen engagieren sich im CLS. Das Herzstück des CLS ist das Doktorandenförderprogramm. Die Doktorierenden werden gemeinsam von ETH-Professor:innen und Max-Planck-Direktor:innen und -Gruppenleiter:innen betreut und erlangen am Ende einen Doktortitel der ETH Zürich.
Literaturhinweis
Wrede P, Degtyaruk O, Kalva SK, Deán-Ben XL, Bozuyuk U, Aghakhani A, Akolpoglu B, Sitti M, Razansky D. Real-time 3D optoacoustic tracking of cell-sized magnetic microrobots circulating in the mouse brain vasculature. Science Advances, 11. Mai 2022. DOI: 10.1126/sciadv.abm9132call_made
ETH Zürich
Rämistrasse 101
CH8092 Zürich
Telefon: +41 (44) 63211-11
Telefax: +41 (44) 63210-10
http://www.hk.ethz.ch
Biomedizinische Bildgebung
Telefon: +41 (44) 63334-29
E-Mail: razansky@biomed.ee.ethz.ch
Telefon: +41 (44) 63241-41
E-Mail: mediarelations@hk.ethz.ch
![]()


Das könnte dich ebenfalls interessieren

EZD goes green: New standards for bio-based coatings
KI-System der nächsten Generation für bayerische Spitzenforschung
