-
Real-time EtherCAT® Network Simulation
EC-Simulator virtualizes EtherCAT networks by simulating the EtherCAT slave devices in order to run EtherCAT Master applications without real EtherCAT slave hardware devices available. EtherCAT simulation is possible via a physical network adapter, or also virtually, to realize a completely simulated machine setup. Configuring the simulation instance is seamless using the ENI file of the real network. With EC-Simulator it is possible to react to Process Data (PDOs), send and receive Service Data (SDOs), interact with the Slave Stack, and more. This is all possible to be programmed via the API available for C/C++ or .NET, enabling the connection of EtherCAT data to various other professional software tools for the…
-
Why RT-Linux is the Best Solution for Adding Real-time Capabilities to Windows
More and more applications, especially in the Industrial Automation, Medical and Data Acquisition and Measurement Markets require deterministic real-time behavior. Windows does not natively support a real-time deterministic operation. However, there are many so called “Windows real-time extensions” that can provide developers with a solution to take full advantage of Windows functionality while still preserving the real-time requirements of their application. Below one can find a guideline for customers with the need for running real-time applications on Windows: Windows and Real-time: Background Background information about the Windows and Real-time Operating Systems Requirements for Real-time Behavior in Windows What must be considered if Real-time applications shall run on Windows Windows Real-time…
-
Real-time qualified Industrial PCs
Today, more and more industrial customers are using PC (Personal Computer) technology for high end sophisticated real-time control applications. These computers have high CPU processing capabilities in relation to their costs when compared to software and hardware development for dedicated platforms. Typical applications where such PCs are used are: CNC and Motion Control Robotics and PLC applications Medical applications like surgical robots or computer tomographs Real-time data acquisition Regular PCs are designed for standard office use while such industrial applications need hardware which is more suitable to their respective environment: Industrial PCs (IPCs)! These Industrial PCs fulfil various requirements like mechanical robustness, power consumption, connectivity, storage. However, some control systems…
-
EtherCAT Master Software Stack Performance
When using EtherCAT technology as a fieldbus, performance often plays a decisive role, but what is really meant by performance? Most often, performance is equated with speed. In the case of an EtherCAT network, this usually means a fast cycle time, around 1kHz or faster, to achieve fast control cycles. However, good performance can also be synonymous with a large amount of data, or with the ability to operate many devices from one controller. In an EtherCAT network, these performance considerations come down to the EtherCAT master, and so therefore, an EtherCAT master software should meet all of these requirements: Support short cycle times for fast device update rates Support…
-
Real-time Hypervisor V8.0: New Features
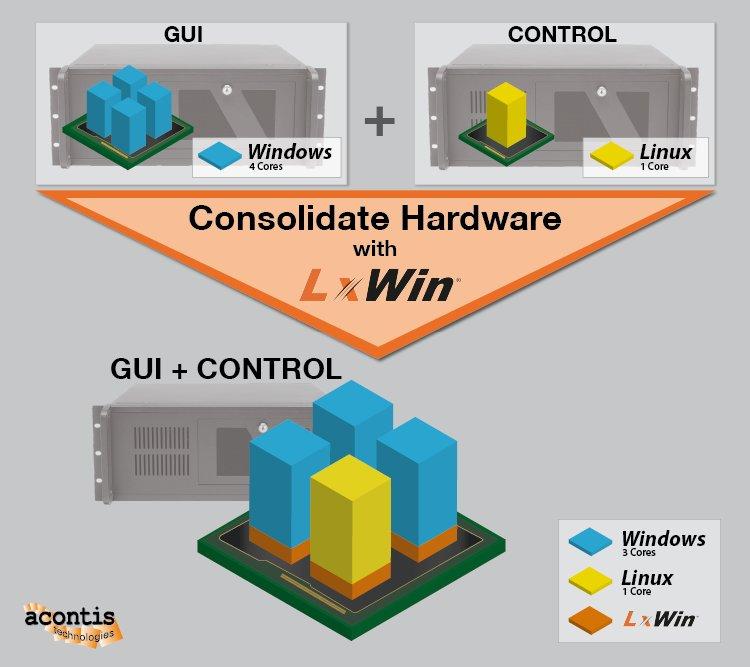
New Features Version V8.0.0.3 General LxWin RTOS32Win General V8.0.0.3 Updated Intel(R) Xeon(R) processor D support for CacheAllocation technology LxWin V8.0.0.3 Support for CPUs with 16 and more cores Support for PCIe devices with MSI interrupts Support for serial port interfaces (RS232) Updated to Linux kernel version 4.9.286 RTOS32Win V8.0.0.3 Update to On Time RTOS-32 version 6.23 Update to EC-Master V3.1.1 Hypervisor Software For many years acontis has been known on the market as a leading provider of solutions for real-time virtualization. These products enable customers to implement hard real-time applications on Windows. The software is also suitable for hardware consolidation tasks, where 2 or more control computers shall be consolidated…
-
Web-based EtherCAT® Configuration and Diagnosis Tool
Web-based EtherCAT® Configuration and Diagnosis Tool EC-Engineer Web is a powerful software tool used for configuration and diagnosis of EtherCAT® networks. The software is a client server application, with the modern dark mode client user interface (UI) an Angular-CLI project communicating through a REST-API with the backend (ASP.NET Core). The Microsoft .NET Core platform is used for development and to run the software on several operating systems and architectures, e.g. Windows, macOS and Linux (x64, ARM32). EC-Engineer Web is using the multi-platform advantage that .NET Core offers for mobility and platform independence. Configuration EC-Engineer Web creates an EtherCAT® Network Information (ENI) file which is based on EtherCAT® Slave Information (ESI) files. The ENI file is used…
-
EC-Engineer V3.7: New Features
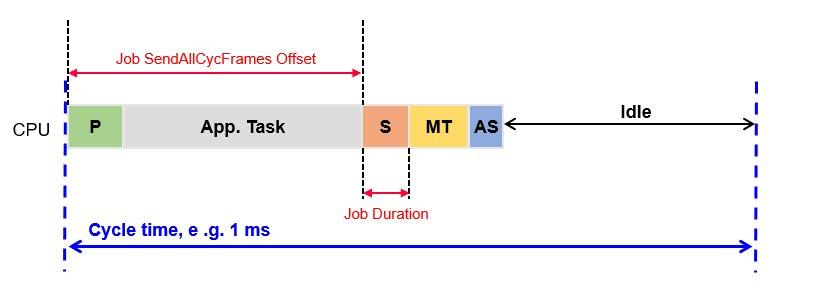
EtherCAT Performance Analysis EC-Master software version V3.1.4 has a built-in performance measurement capability. This can be used to measure the execution times of job functions that are called within the cyclic part of the application, as well as application specific functions. The results are clearly displayed in EC-Engineer V3.7. The time offset related to the start of cycle and the duration of each cyclic job is shown in a network timing diagram and a table. This is very helpful to evaluate the total CPU load of the EtherCAT master and the total task duration of the EtherCAT cyclic task. Learn more about the topic EtherCAT Master performance in this blog. The most usual…
-
EC-Master V3.1: New Features
. EC-Master has been updated… New Features Version 3.1.3 Built-in Performance Measurement The acontis EC-Master software has a built-in performance measurement capability. This can be used to measure the execution times of the job functions that are called within the cyclic part of the application, as well as application specific functions. In addition, it is possible to measure the location of benchmarks within a cycle. Execution times can be recorded in form of overall statistics (min/avg/max) and in form of histograms of all measured times. In the included example application, performance measurements can be activated using the command line parameter (-perf). Out-of-the box support for Xenomai 3 on ARM CPUs…
-
Real-time EtherCAT® Network Simulation
Run an EtherCAT Controller with a Simulated Network EC-Simulator virtualizes EtherCAT networks by simulating the EtherCAT slave devices in order to run EtherCAT Master applications without real EtherCAT slave hardware devices available. EtherCAT simulation is possible via a physical network adapter, or also virtually, to realize a completely simulated machine setup. Configuring the simulation instance is seamless using the ENI file of the real network. With EC-Simulator it is possible to react to Process Data (PDOs), send and receive Service Data (SDOs), interact with the Slave Stack, and more. This is all possible to be programmed via the API available for C/C++ or .NET, enabling the connection of EtherCAT data…
-
Windows Real-time Hypervisor Update V7.1.2
acontis technologies has updated its Windows Real-time extension and Hypervisor products to version V7.1.2. The acontis Hypervisor solutions enable customer running deterministic hard Real-time applications alongside Windows 10. The acontis product family offers various solutions to cover different customer requirements: EC-Win: Windows Real-time EtherCAT solution. See also: https://www.acontis.com/en/ethercat-windows-realtime.html LxWin: Windows Real-time extension and Hypervisor supporting Real-time Linux. See also: https://www.acontis.com/en/windows-realtime.html and https://www.acontis.com/en/windows-linux-realtime.html VxWin: Windows Real-time Hypervisor supporting VxWorks See also: https://www.acontis.com/en/vxworks-hypervisor.html RTOS32Win: Windows Real-time extension and Hypervisor supporting On Time RTOS-32 See also: https://www.acontis.com/en/on-time-rtos-32.html Microsoft has ended the ability to cross-sign drivers. Cross-signing of drivers is required by any Windows 64-bit OS prior to Windows 10. If a driver is…