-
New Global ADS Regulations: Why the Control Layer Is Becoming a Key Technology for Software-Defined Vehicles
With the adoption of UN Regulation No. 185 and UN Global Technical Regulation No. 26 for Automated Driving Systems, UNECE WP.29 established a new international reference point— —in June 2026. It applies to highly and fully automated driving functions within a defined Operational Design Domain—including applications in which the vehicle is operated without continuous human control. The combination of two instruments is crucial. UN R185 is associated with the 1958 Convention and provides a framework for type approval by contracting parties that apply the regulation. UN GTR 26 is part of the 1998 Convention and establishes a globally harmonized technical foundation that must be transposed into national or regional regulations.…
-
Neue globale ADS-Regelwerke: Warum die Control Layer zur Schlüsseltechnologie softwaredefinierter Fahrzeuge wird
Mit der Verabschiedung der UN-Regelung Nr. 185 und der UN Global Technical Regulation Nr. 26 für Automated Driving Systems hat UNECE WP.29 im Juni 2026 einen neuen internationalen Referenzpunkt geschaffen. Er richtet sich an hoch- und vollautomatisierte Fahrfunktionen innerhalb einer definierten Operational Design Domain – einschließlich Anwendungen, in denen das Fahrzeug ohne fortlaufende Fahraufgabe durch einen Menschen betrieben wird. Entscheidend ist die Kombination zweier Instrumente. UN R185 ist dem 1958er-Übereinkommen zugeordnet und bildet einen Rahmen für die Typgenehmigung durch Vertragsparteien, die die Regelung anwenden. UN GTR 26 gehört zum 1998er-Übereinkommen und schafft eine global harmonisierte technische Grundlage, die in nationale oder regionale Regelsetzung überführt werden muss. Es entsteht deshalb nicht…
-
New Global ADS Standards: Arnold NextG Puts the Control Layer at the Center of Future Vehicle Architectures
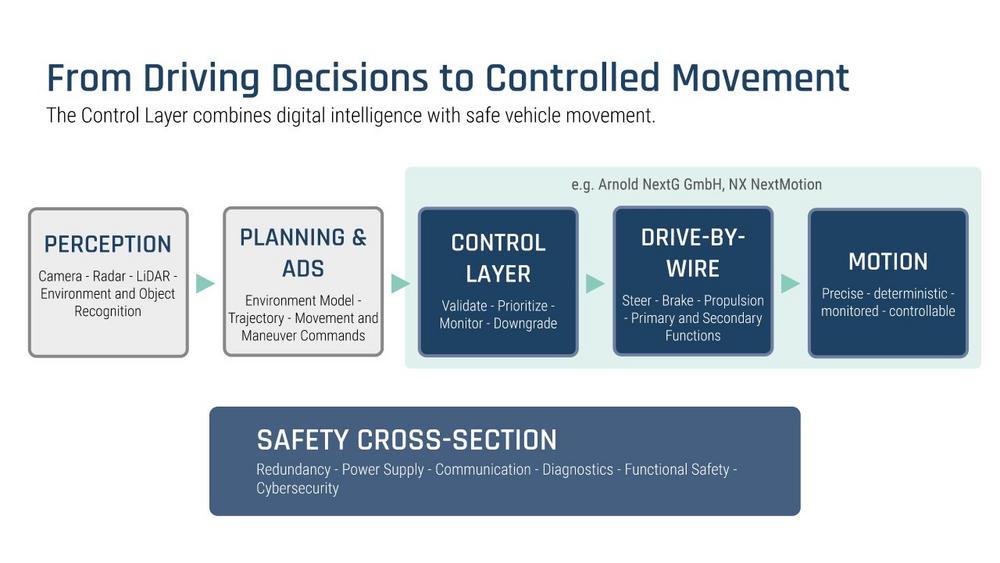
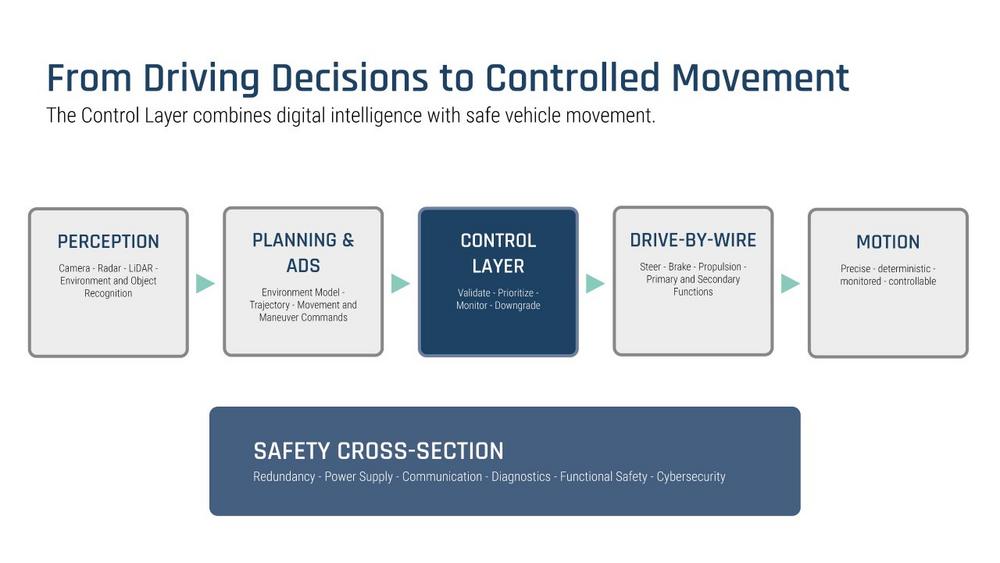
Key Takeaways: The new ADS regulations are technology-neutral but address safety across development, approval, and operation. This makes the safe implementation of digital driving decisions a distinct architectural and validation topic. Arnold NextG describes Safety-by-Wire® and NX NextMotion as platform-independent control layers between ADS, teleoperation, driver interaction, and vehicle motion With the adoption of UN Regulation No. 185 and UN Global Technical Regulation No. 26 for Automated Driving Systems (ADS), the UNECE World Forum for the Harmonization of Vehicle Regulations (WP.29) expanded the international reference framework for automated driving in June 2026 and established harmonized requirements for fully automated driving functions for the first time. It also covers applications in…
-
Neue globale ADS-Regelwerke: Arnold NextG rückt die Control Layer in den Mittelpunkt zukünftiger Fahrzeug-Architekturen
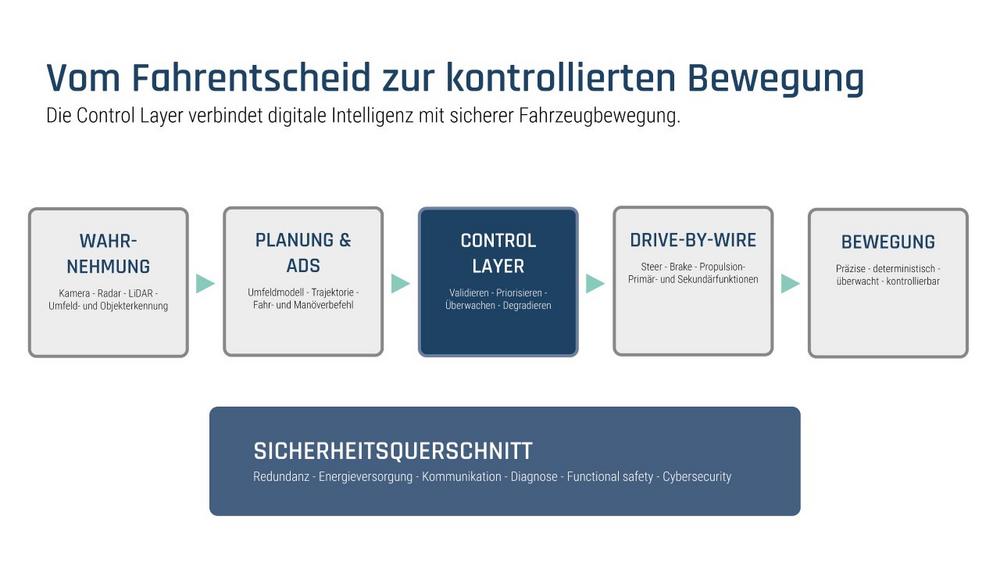
. Kernaussagen: Die neuen ADS-Regelwerke sind technologie-neutral, betrachten Sicherheit jedoch über Entwicklung, Genehmigung und Betrieb hinweg. Damit wird die sichere Umsetzung digitaler Fahrentscheidungen zu einem eigenständigen Architektur- und Nachweisthema. Arnold NextG beschreibt Safety-by-Wire® und NX NextMotion als plattformunabhängige Control Layer zwischen ADS, Teleoperation, Fahrerinteraktion und Fahrzeugbewegung Mit der Verabschiedung der UN-Regelung Nr. 185 und der UN Global Technical Regulation Nr. 26 für Automated Driving Systems (ADS) hat das Weltforum für die Harmonisierung von Fahrzeugvorschriften der UNECE (WP.29) im Juni 2026 den internationalen Referenzrahmen für automatisiertes Fahren erweitert und erstmals harmonisierte Anforderungen für vollautomatisierte Fahrfunktionen geschaffen. Er umfasst auch Anwendungen, in denen ein Fahrzeug innerhalb seiner Operational Design Domain ohne fortlaufende…
-
From Pilot Project to Full-Scale Operation: Why Regulation Is Part of the System Architecture of Autonomous Mobility
Following discussions on scale, system architecture, responsibility, trust, and regular operation, this blog series comes full circle with the topic of regulation. Today, autonomous mobility rarely fails due to a lack of laws. The real challenge lies in understanding regulatory requirements not as a post-hoc approval process, but as an integral part of system development. Approval Readiness Is Built into System Development This is precisely where a strategic error in thinking lies. All too often, regulation is only considered at the very end of innovation projects: first, the vehicle, software, and functions are developed; only then are approvals, responsibilities, and safety certifications addressed. For public transit, however, this approach falls…
-
Vom Pilotprojekt zum Regelbetrieb: Warum Regulierung Teil der Systemarchitektur autonomer Mobilität ist
Nach Maßstab, Systemarchitektur, Verantwortung, Vertrauen und Regelbetrieb schließt sich mit der Regulierung der Kreis dieser Blogserie. Autonome Mobilität scheitert heute kaum mehr an fehlenden Gesetzen. Die eigentliche Herausforderung besteht darin, regulatorische Anforderungen nicht als nachgelagerte Genehmigung, sondern als festen Bestandteil der Systementwicklung zu verstehen. Genehmigungsfähigkeit entsteht in der Systementwicklung Genau darin liegt ein strategischer Denkfehler. Zu oft wird Regulierung in Innovationsprojekten erst am Ende mitgedacht: Zunächst entstehen Fahrzeug, Software und Funktionen, anschließend werden Genehmigungen, Zuständigkeiten und Sicherheitsnachweise betrachtet. Für den öffentlichen Nahverkehr (ÖPNV) greift dieses Vorgehen jedoch zu kurz. Hier entscheidet Regulierung nicht erst über die Zulassung eines Fahrzeugs, sondern prägt bereits die Ausgestaltung von Betriebsbereichen, Verantwortlichkeiten, technischer Aufsicht, Sicherheitskonzepten…
-
Autonomous mobility in local transport requires a new system architecture
The discussion about autonomous mobility often focuses on the automation of individual vehicles. In fact, however, its greatest potential lies elsewhere: it opens up the possibility of improving public mobility where traditional scheduled services reach their limits. Especially for the first and last mile, in rural areas, during off-peak hours, or for small-scale service needs, new requirements arise that can only be met economically to a limited extent with rigid schedules and large vehicles. The federal government explicitly describes autonomous driving as an opportunity to complement public transit and to create new mobility options, particularly in rural and outlying regions. The future of public transit therefore lies not only in…
-
Der neue Nahverkehr braucht eine neue Systemarchitektur
Autonome Mobilität wird häufig auf die Automatisierung einzelner Fahrzeuge reduziert. Ihr größtes Potenzial liegt jedoch darin, den öffentlichen Nahverkehr durch neue Betriebsmodelle gezielt zu ergänzen. Tatsächlich liegt ihr größtes Potenzial jedoch an einer anderen Stelle: Sie eröffnet die Möglichkeit, öffentliche Mobilität dort zu verbessern, wo klassische Linienverkehre an ihre Grenzen stoßen. Gerade auf der ersten und letzten Meile, in ländlichen Räumen, während nachfrageschwacher Zeiten oder bei kleinräumigen Erschließungsaufgaben entstehen neue Anforderungen, die sich mit starren Fahrplänen und großen Fahrzeugen nur eingeschränkt wirtschaftlich bedienen lassen. Die Bundesregierung beschreibt autonomes Fahren ausdrücklich als Chance, den öffentlichen Verkehr zu ergänzen und insbesondere in ländlichen sowie zentrumsfernen Regionen neue Mobilitätsangebote zu schaffen. Die Zukunft…
-
The driver shortage is the stress test for public transport
Autonomous mobility is not driven solely by technological innovation. The growing shortage of skilled workers is becoming one of the strongest drivers of new operating models in public transport. This is fundamentally changing the requirements for vehicle architecture, operational organisation and system control. Driver Shortages Are Changing the Operational Architecture of Public Transit The discussion about autonomous mobility often centers on technological issues: sensors, AI, levels of automation, and approval processes take center stage. For the future of public transportation, however, another factor is likely to become at least as crucial: the growing shortage of qualified drivers. What was long considered an operational staffing problem for individual transit companies is…
-
Fahrermangel ist der Stresstest für den öffentlichen Verkehr
Autonome Mobilität wird nicht nur durch technologische Innovation vorangetrieben. Der zunehmende Fachkräftemangel entwickelt sich zu einem der stärksten Treiber neuer Betriebsmodelle im öffentlichen Verkehr. Dadurch verändern sich die Anforderungen an Fahrzeugarchitektur, Betriebsorganisation und Systemsteuerung grundlegend. Fahrermangel verändert die Betriebsarchitektur des ÖPNV Die Diskussion über autonome Mobilität wird häufig entlang technologischer Fragestellungen geführt: Sensorik, KI, Automatisierungsgrade oder Zulassungsverfahren stehen im Mittelpunkt. Für den zukünftigen öffentlichen Verkehr dürfte jedoch ein anderer Faktor mindestens ebenso entscheidend werden: der zunehmende Mangel an qualifiziertem Fahrpersonal. Was lange als operatives Personalproblem einzelner Verkehrsunternehmen galt, entwickelt sich zunehmend zu einer strukturellen Herausforderung für den gesamten Mobilitätssektor. Ausfallende Schichten, reduzierte Fahrpläne oder nicht realisierbare Angebotsausweitungen sind vielerorts bereits…